
FAU Engineering Lands NSF Grant for Multi-robot Coordination Testbed





The project will tackle some of the most challenging problems in autonomous systems by enabling robust, scalable coordination of aerial robot teams in unpredictable real-world environments.
The College of Engineering and Computer Science at Florida Atlantic University has received a grant from the National Science Foundation (NSF) for the development of an advanced experimental testbed for multi-robot coordination.
The project titled, “Scalable Distributed Optimal Control Algorithms Validated on Multi-robot Testbed,” will tackle some of the most challenging and fundamental problems in autonomous systems by enabling robust and scalable coordination among teams of aerial robots operating in real-world, often unpredictable environments.
Current approaches to multi-robot systems frequently rely on centralized computation and perfect localization, conditions that rarely hold true outside of ideal laboratory settings. In practice, robots must function amid uncertainty, limited communication and heterogeneous sensor capabilities. This project embraces that reality by developing distributed algorithms that allow robots to interact using only on-board sensors in a decentralized and resilient manner.
A key focus will be on managing what are known as asymmetric interactions – cases in which two robots do not perceive or communicate with each other in the same way due to differing sensor modalities or environmental factors. These types of interactions are inherent in real-world settings and present a significant challenge for stable and efficient coordination.
“Receiving this grant from the National Science Foundation marks a significant milestone in our research,” said Pratik Mukherjee, Ph.D., principal investigator and an assistant professor in the FAU Department of Ocean and Mechanical Engineering. “I’m incredibly grateful for the opportunity to advance this work, which not only pushes the frontiers of theoretical robotics but also creates practical tools the broader research community can build upon. This support will enable us to develop a cutting-edge experimental testbed and provide our students with hands-on learning experiences that are both rare and transformative.”
The research will address the coupled problems of stability and optimality in these interactions through the development of new distributed algorithms. Specifically, the team will work on solving the Optimal Topology Selection Problem (OTSP), a complex formulation that determines the most effective way for robots to interact with one another to achieve reliable coordination. These algorithms will be validated through high-fidelity simulations and ultimately implemented on a fleet of unmanned aerial vehicles (UAVs) at FAU’s SeaTech campus in Dania Beach. This facility is already equipped with an OptiTrack motion capture system capable of tracking up to 18 UAVs simultaneously, offering an ideal environment for real-world testing.
The impact of the project extends far beyond its technical goals. The experimental testbed also will be integrated into educational programs across multiple levels. At FAU, students in robotics and engineering will gain direct experience working with UAVs and distributed systems, helping prepare them for careers in a rapidly evolving technological landscape. The testbed also will support outreach to high school students through existing summer programs, where participants will receive instruction in safe drone operation through The Recreational UAS Safety Test (TRUST), an FAA-aligned training initiative that promotes responsible UAV usage among young people.
With the $200,000 NSF grant, Mukherjee plans to incorporate the testbed into a new course on multi-robot systems, further enriching the academic environment and providing sustained value to the FAU community. Moreover, the testbed will be made accessible to external researchers, providing a shared platform for validating theories and bridging the often-difficult simulation-to-reality gap in robotics research.
“This exciting and impactful research initiative addresses real-world challenges in robotics and autonomy, with applications ranging from advanced UAV systems to more resilient coordination strategies,” said Stella Batalama, Ph.D., the dean of the College of Engineering and Computer Science. “Led by Professor Mukherjee, this project underscores Florida Atlantic’s leadership in robotics and engineering and reflects our broader commitment to addressing complex challenges through science, education and collaboration. The outcomes of this project will expand our research capabilities, provide valuable hands-on training for students, and contribute to advancements with direct relevance to both industry and academia.”
Mukherjee brings a strong track record of expertise to this project, with prior work that includes developing centralized formulations of the OTSP, designing scalable distributed control algorithms, and building an outdoor testbed for multi-robot experimentation.
“This grant will enable us to build upon our foundation by developing solutions that are not only grounded in strong theory but also effective in real-world applications and accessible to the broader robotics research community,” said Mukherjee.
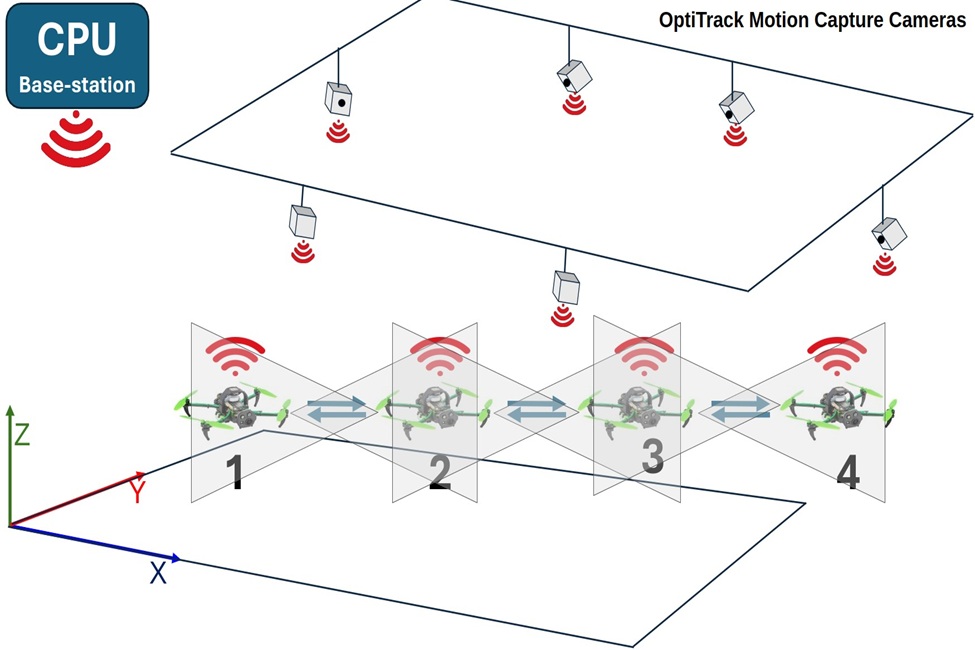
Rendering of an indoor multi-robot set up.
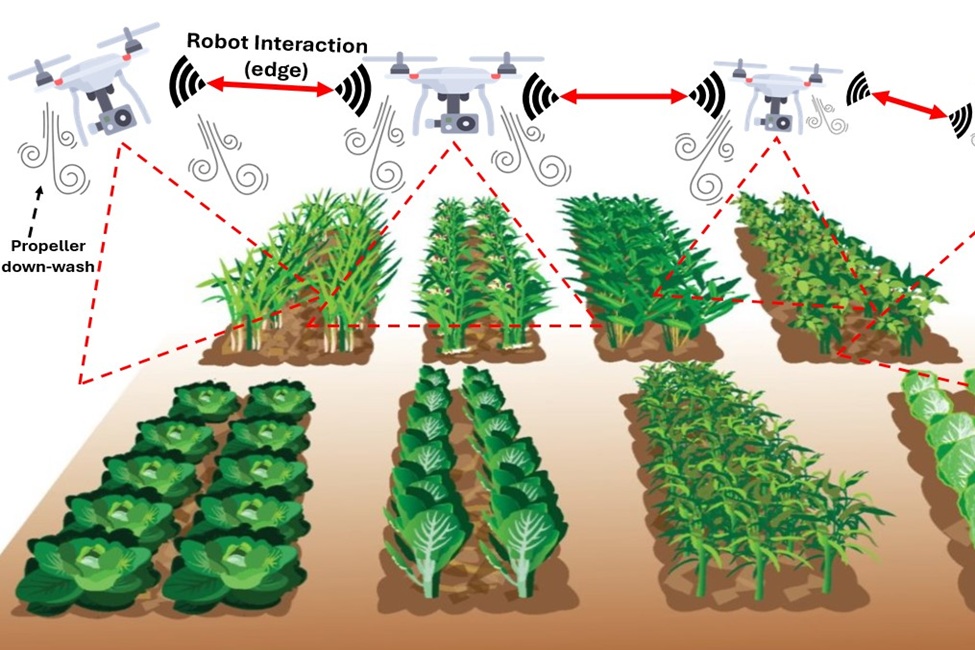
Rendering of an outdoor multi-robot set up.
-FAU-